
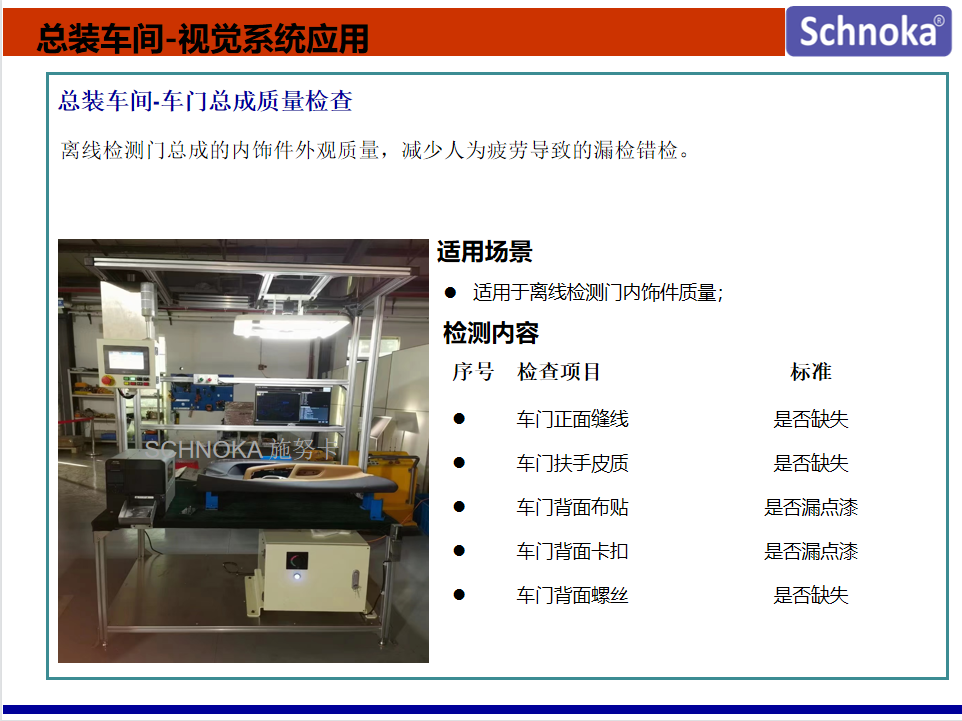
总装车间-车门总成质量检查离线检测门总成的内饰件外观质量,减少人为疲劳导致的漏检错检。适用场景适用于离线检测门内饰件质量;检测内容检查项目标准车门正面缝线是否缺失车门扶手皮质是否缺失车门背面布贴是否漏...
查看更多 2022-05-16

总装车间-全景玻璃引导自动安装座椅通过输送线输送到安装工位,机器人抓取全景玻璃总成,移动到对中台上方,视觉定位并多个特征点的图像处理来解算目标在空间中的6自由度位置变化量,从而引导机器人修正轨迹,精准...
查看更多 2022-05-16
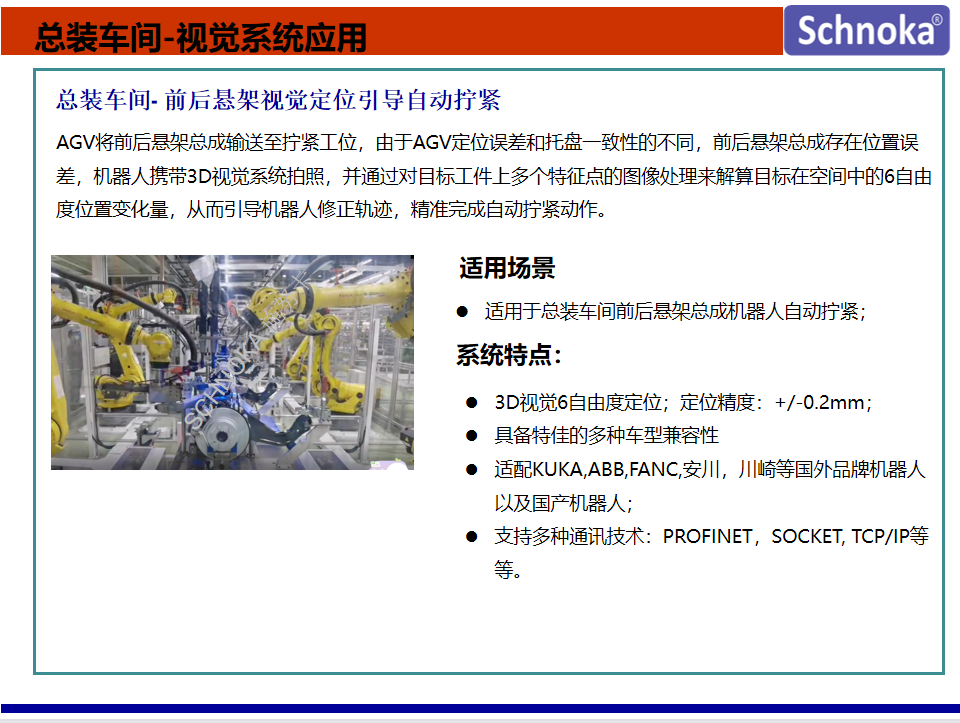
总装车间-前后悬架视觉定位引导自动拧紧AGV将前后悬架总成输送至拧紧工位,由于AGV定位误差和托盘一致性的不同,前后悬架总成存在位置误差,机器人携带3D视觉系统拍照,并通过对目标工件上多个特征点的图...
查看更多 2022-05-16
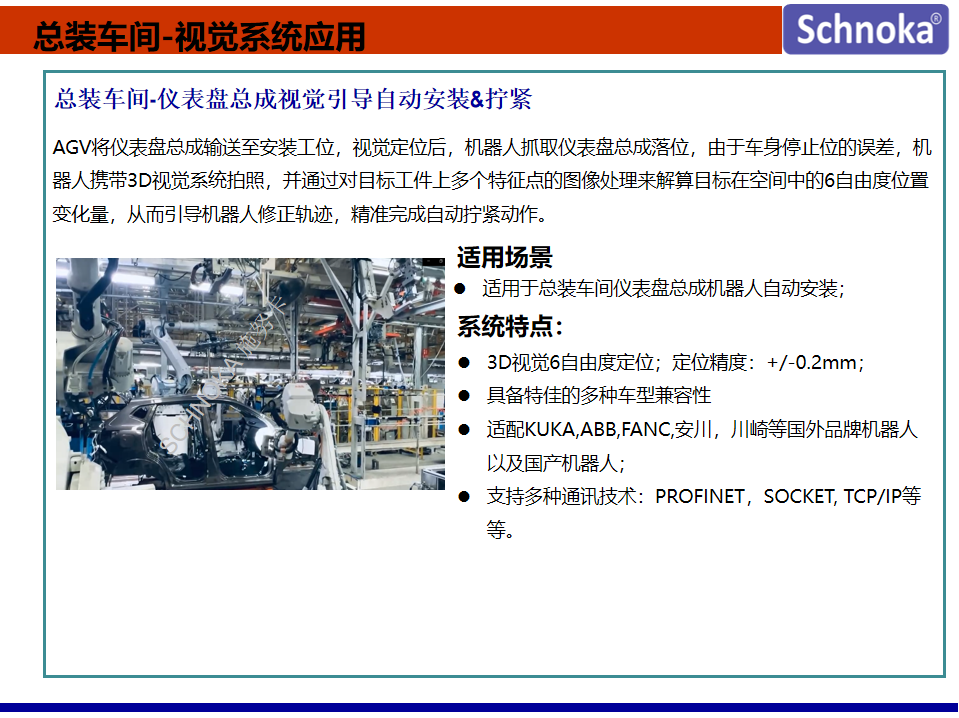
总装车间-仪表盘总成视觉引导自动安装及拧紧AGV将仪表盘总成输送至安装工位,视觉定位后,机器人抓取仪表盘总成落位,由于车身停止位的误差,机器人携带3D视觉系统拍照,并通过对目标工件上多个特征点的图像处...
查看更多 2022-05-16
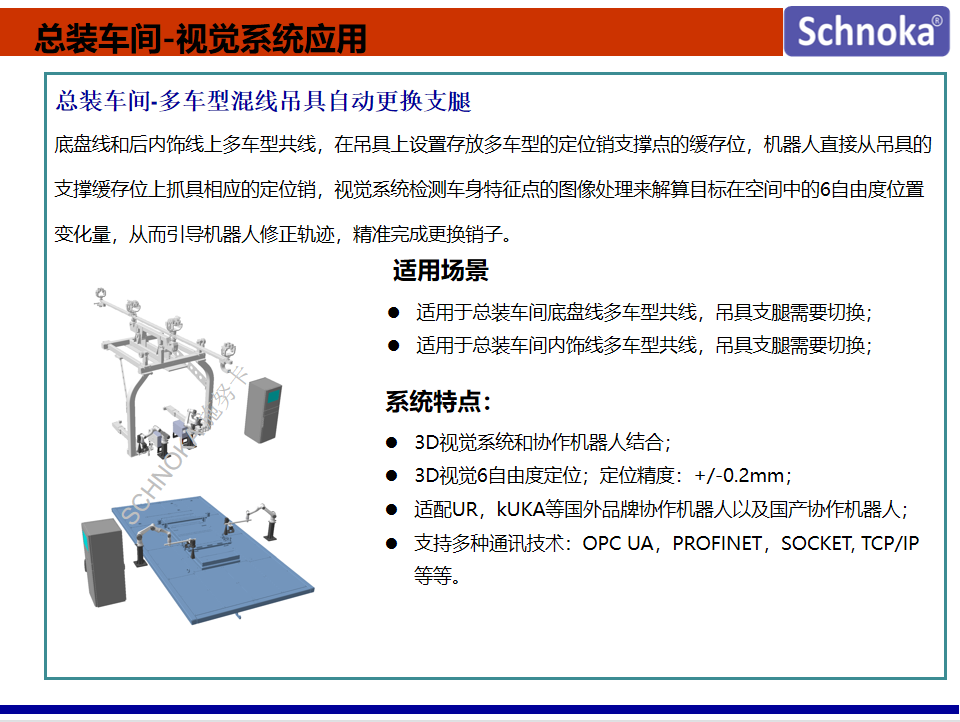
总装车间-多车型混线吊具自动更换支腿底盘线和后内饰线上多车型共线,在吊具上设置存放多车型的定位销支撑点的缓存位,机器人直接从吊具的支撑缓存位上抓具相应的定位销,视觉系统检测车身特征点的图像处理来解算目...
查看更多 2022-05-16

总装车间-电池PACK表面异物检测电池PACK将通过输送线或AGV进入检测工位,滑动机构携带视觉系统检查PACK表面,结合3D点云和AI算法分析判断PACK表面是否存在异物。适用场景适用于总装车间电池...
查看更多 2022-05-16

总装车间-后桥总成弹簧位置检测AGV将前桥总成输送至后桥安装工位,通过固定安装的2D视觉系统拍照,并通过对工件上得特征点的图像处理来解算弹簧相对于参考点的位置变化量,识别位置是否正确。适用场景适用于总...
查看更多 2022-05-16

总装车间-前桥总成自动抓取AGV将前桥总成输送至前桥安装工位,由于AGV定位误差和托盘一致性的不同,前桥总成存在位置误差,机器人携带3D视觉系统拍照,并通过对目标工件上多个特征点的图像处理来解算目标在...
查看更多 2022-05-15

总装车间-座椅自动抓取及视觉引导安装座椅通过空中EMS输送到安装工位,机器人空中抓取座椅,机器人读取输送线的速度,线体方向同步线速将座椅运动到预装位置,视觉定位并多个特征点的图像处理来解算目标在空间中...
查看更多 2022-05-14

总装车间-前后挡风玻璃引导自动安装(BESTFIT)VTS(SCHNOKA)3D最佳匹配式引导系统用于辅助机器人替换人工实现工件精准装配。通过对工件与车身关键匹配区域的间隙面差测量来解算工件在车身上的...
查看更多 2022-05-14

总装车间-前后挡风玻璃涂胶检测VTS(SCHNOKA)3D涂胶检测系统通过检测胶条宽度、高度以及连续性,实现涂胶质量的在线监控以及缺陷预警。系统在涂胶过程中实时采集胶条图像,分析图像中胶条的特征,判断...
查看更多 2022-05-14

轮胎输送到辊道线末端工位,3D视觉定位,机器人自动抓取,轮胎安装机器人通过3D视觉定位制动刹车盘后随行完成前轮胎的装配工作。适用场景适用于轮胎辊道线上定位抓件;适用于料框中直接抓件(轮胎在料框中已经排...
查看更多 2022-05-13

将依照MES系统实时推送给智能检测系统的车型配置信息在数据库中调取对应的正确图片和信息与视觉系统检测到的车身底盘固定螺栓、卡扣、漆标、胶圈、漏液印记等信息与数据库信息进行对比、判断,对检查结果通过工位...
查看更多 2022-05-13
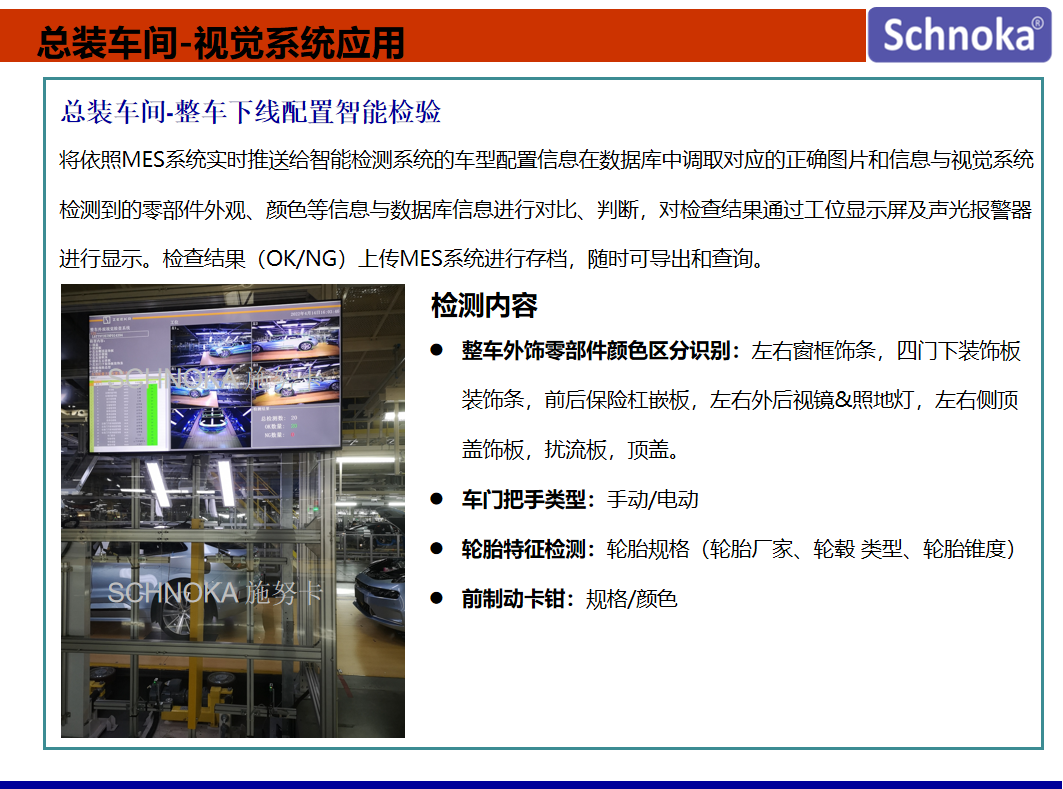
将依照MES系统实时推送给智能检测系统的车型配置信息在数据库中调取对应的正确图片和信息与视觉系统检测到的零部件外观、颜色等信息与数据库信息进行对比、判断,对检查结果通过工位显示屏及声光报警器进行显示。...
查看更多 2022-05-13
施努卡活塞环质量视觉检测系统有以下几种工艺认边 光学识别活塞环正反面环高 取开口处+另外2处打标 单面激光镭雕字符识别 ...
查看更多 2022-01-05

EOL测试实现功能&配置:插头寻位,精度0.1mm;插接前后检测Pin针状态:PIN针的歪斜和有无;SCHNOKAVISIONMAX软件处理;Basle面阵相机/Cognex面阵相机...
查看更多 2020-09-26

铜排拧紧及顶部圆盖引导实现功能&配置:1、圆盖寻位,精度0.1mm2.静止拍照,一次检测一个孔(尺寸直径30mm);3.SCHNOKAVISIONMAX软件处理;4.Basle面阵相...
查看更多 2020-09-26
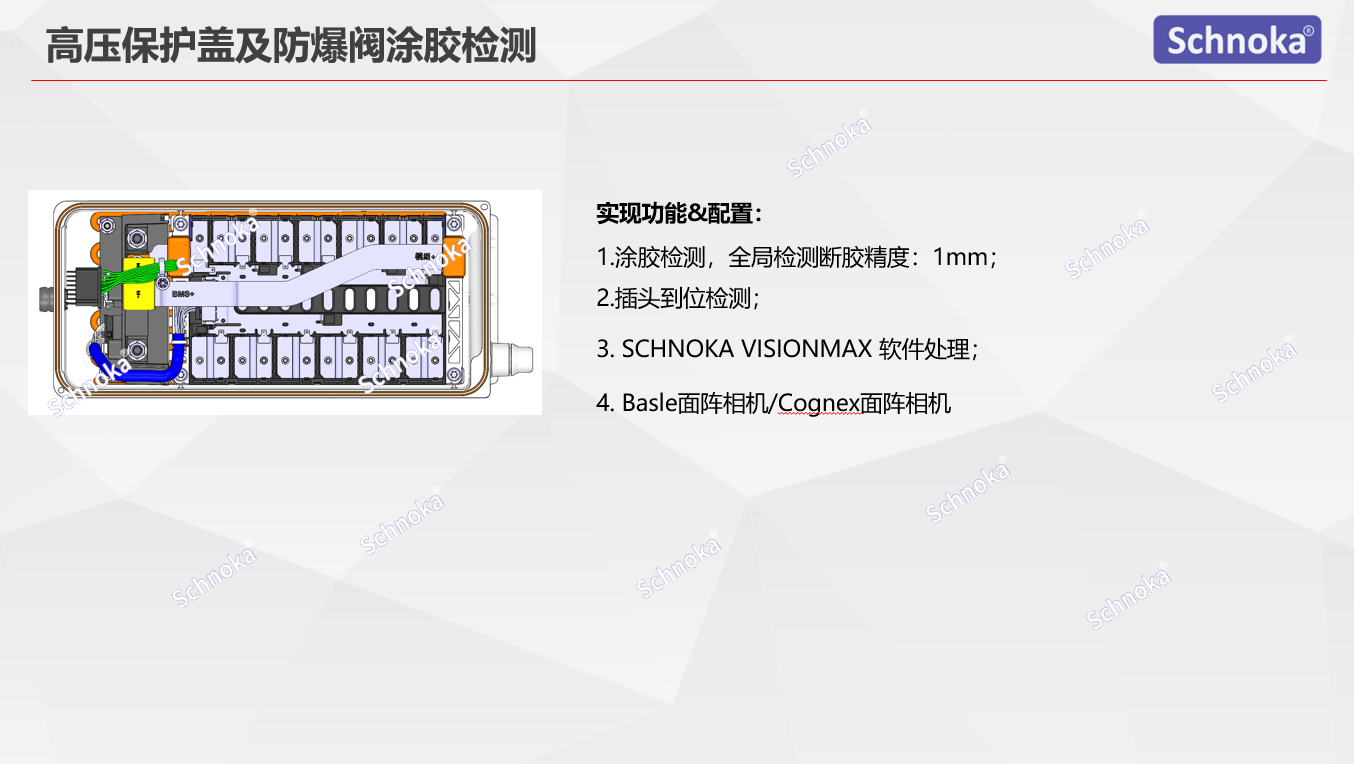
高压保护盖及防爆阀涂胶检测实现功能&配置:涂胶检测,全局检测断胶精度:1mm;插头到位检测;SCHNOKAVISIONMAX软件处理;Basle面阵相机/Cognex面阵相机...
查看更多 2020-09-26

高压保护盖及防爆阀安装引导实现功能&配置:1.安装在机器人端,每种零件各拍一次;2.零件寻位,精度0.1mm;3.SCHNOKAVISIONMAX软件处理;4.Basle面阵相机...
查看更多 2020-09-26
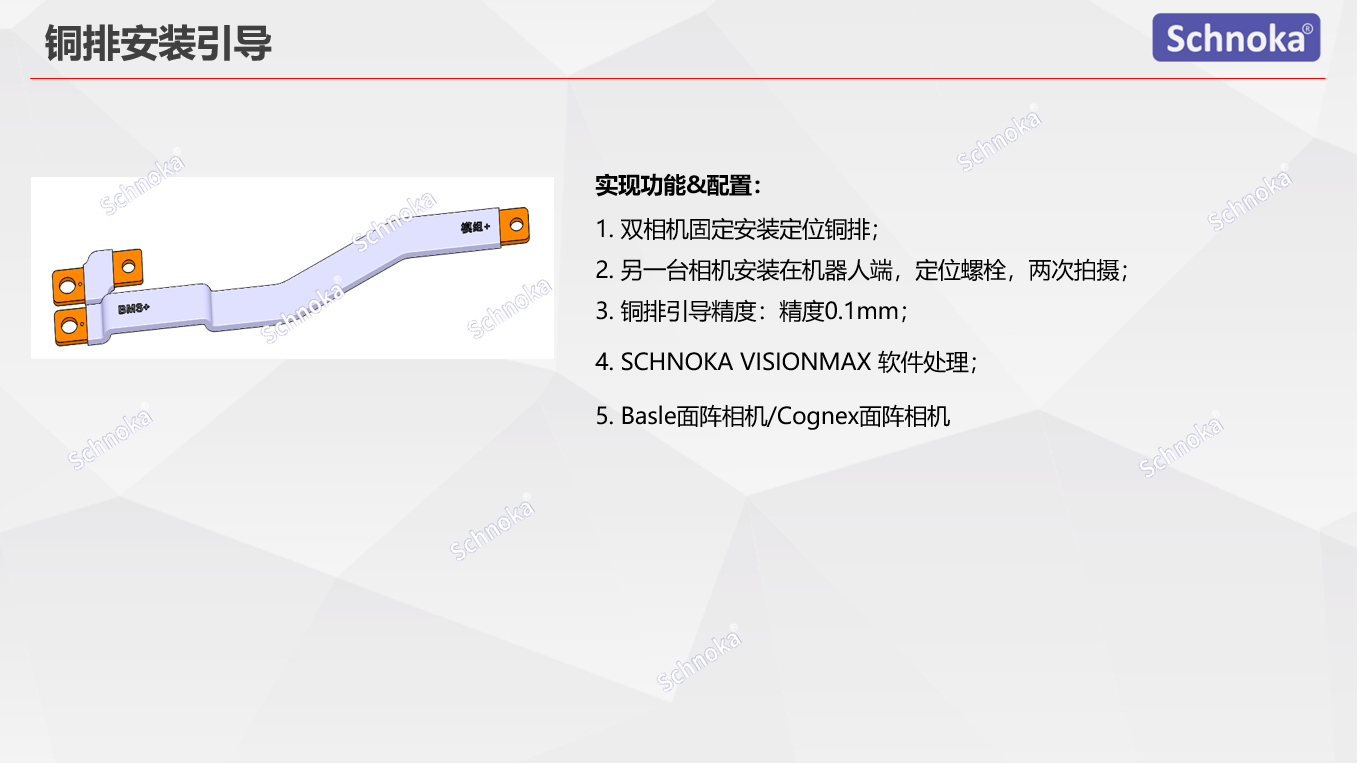
铜排安装引导实现功能&配置:1.双相机固定安装定位铜排;2.另一台相机安装在机器人端,定位螺栓,两次拍摄;3.铜排引导精度:精度0.1mm;4.SCHNOKAVISIONMAX软件处...
查看更多 2020-09-26
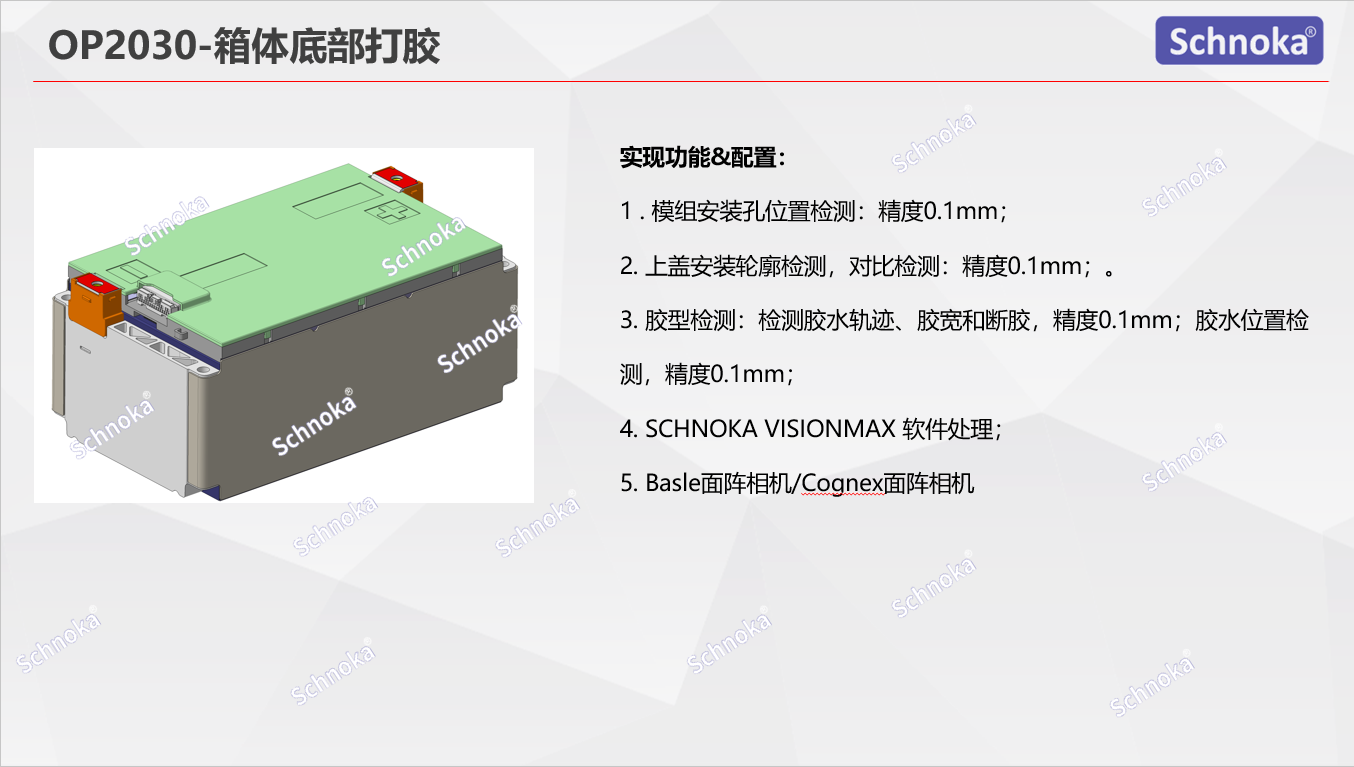
OP2030-箱体底部打胶实现功能&配置:1.模组安装孔位置检测:精度0.1mm;2.上盖安装轮廓检测,对比检测:精度0.1mm;。3.胶型检测:检测胶水轨迹、胶宽和断胶,精度0.1mm;胶...
查看更多 2020-09-26

箱体上料清洗工位寻位&底部贴泡棉检测实现功能&配置:1下壳体寻位,精度0.1mm;泡棉寻位,精度0.1mm;泡棉粘贴无歪斜褶皱,位置度精度:0.3mmSCHNOKAVISIONMA...
查看更多 2020-09-26

OP1240-模组底部平面度检测实现功能&配置:1.单线激光伺服移动,单边扫描一次,共计两次;2.底部平面度检测,精度0.02mm;3.测G06的尺寸,精度:0.02mm;3.SCHNOKA...
查看更多 2020-09-26
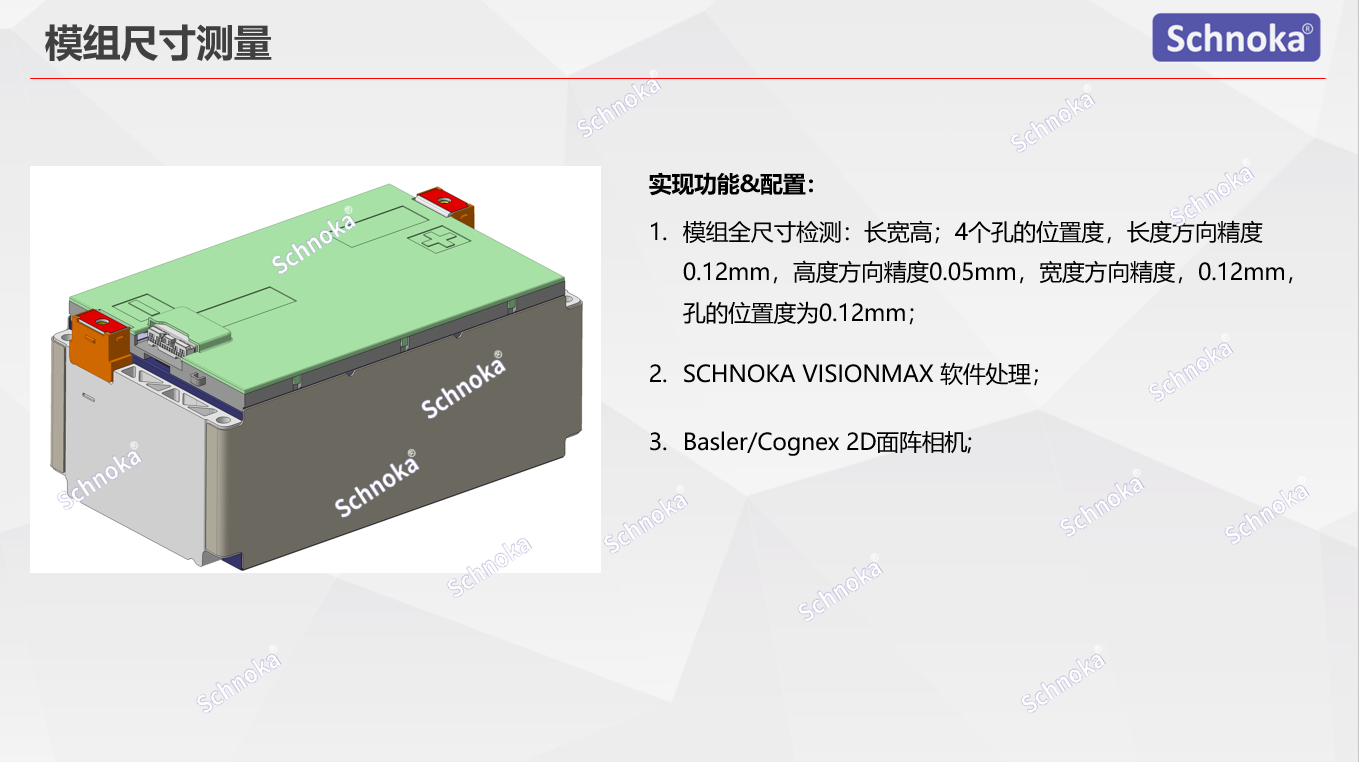
模组尺寸测量实现功能&配置:1.模组全尺寸检测:长宽高;4个孔的位置度,长度方向精度0.12mm,高度方向精度0.05mm,宽度方向精度,0.12mm,孔的位置度为0.12mm;2.SCHNO...
查看更多 2020-09-26

